
We log anonymous usage statistics. Please read the privacy information for details.
How mobile robots can self-organise a vocabulary
Synopsis
One of the hardest problems in science is the symbol grounding problem, a question that has intrigued philosophers and linguists for more than a century. With the rise of artificial intelligence, the question has become very actual, especially within the field of robotics. The problem is that an agent, be it a robot or a human, perceives the world in analogue signals. Yet humans have the ability to categorise the world in symbols that they, for instance, may use for language.
This book presents a series of experiments in which two robots try to solve the symbol grounding problem. The experiments are based on the language game paradigm, and involve real mobile robots that are able to develop a grounded lexicon about the objects that they can detect in their world. Crucially, neither the lexicon nor the ontology of the robots has been preprogrammed, so the experiments demonstrate how a population of embodied language users can develop their own vocabularies from scratch.
Statistics
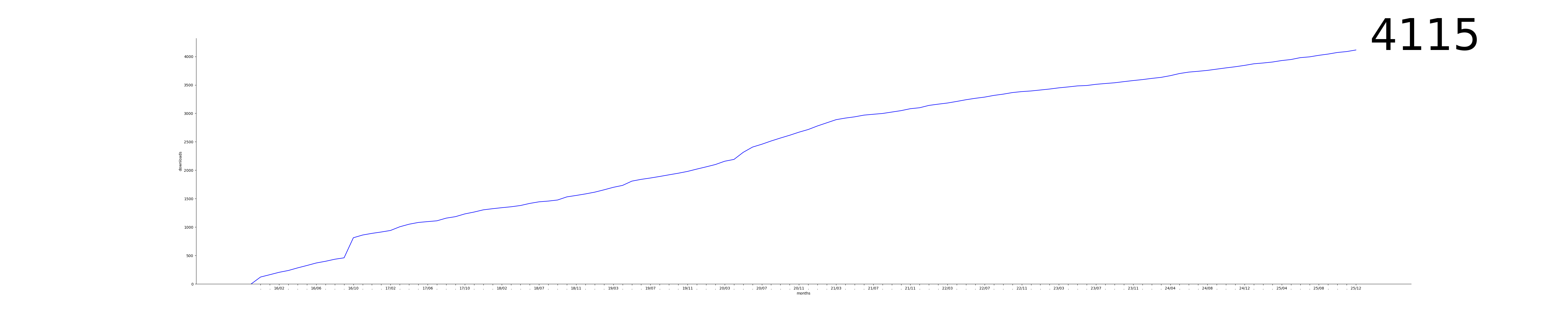
Downloads
Published
December 15, 2015
LaTeX source on
GitHub
Print ISSN
2364-7809
Cite as
Vogt, Paul. 2015. How mobile robots can self-organise a vocabulary. (Computational Models of Language Evolution 2). Berlin: Language Science Press. DOI: 10.17169/langsci.b50.113
Copyright (c) 2016 Paul Vogt
Details about the available publication format: PDF
PDF
978-3-946234-01-2
Publication date (01)
2015-12-14
doi
10.17169/langsci.b50.113
Details about the available publication format: Bibliography
Bibliography
Publication date (01)
2015-12-14
doi
10.17169/langsci.b50.142
Details about the available publication format: Hardcover
Hardcover
ISBN-13 (15)
978-3-946234-00-5